





人工智能
人工智能(Artificial Intelligence,简称AI)是一种模拟、延伸和扩展人类智能的技术科学。它旨在通过计算机系统和算法来模拟人类智能的某些方面,包括学习、推理、感知、理解和自我修正等能力。人工智能的研究领域十分广泛,涵盖了机器学习、自然语言处理、计算机视觉、智能控制等多个方面。
研究详情
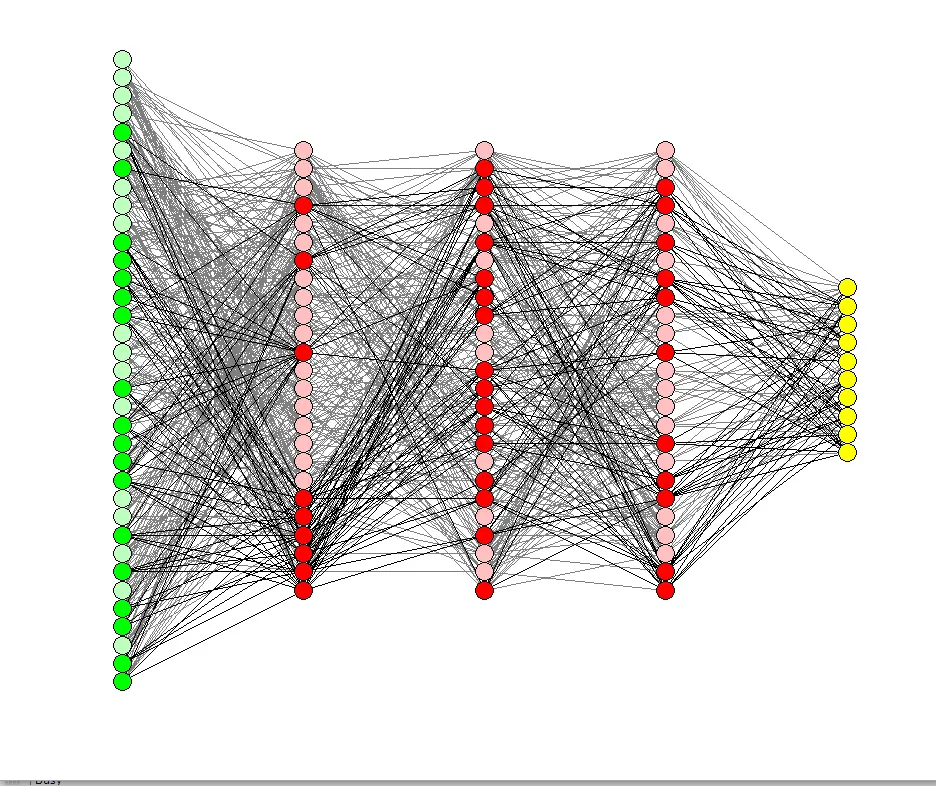
人工智能的发展经历了多个阶段,从最初的符号主义、连接主义到深度学习等,每一次技术革新都极大地推动了人工智能的发展。深度学习技术的出现使得人工智能在处理大规模数据、复杂问题等方面取得了突破性进展,为人工智能的广泛应用奠定了基础。
人工智能的应用领域非常广泛,不仅限于传统的工业自动化、智能制造等领域,还广泛应用于医疗、金融、教育、交通等各个行业。例如,在医疗领域,人工智能可以帮助医生进行疾病诊断、药物研发、患者管理等工作,提高医疗效率和质量;在金融领域,人工智能可以帮助银行进行风险评估、信用评分等工作,降低金融风险;在教育领域,人工智能可以根据学生的学习特点和需求,提供个性化的教育方案,提高教育效率和质量。
未来,人工智能的发展趋势将是多元化、深度化和广泛化。随着技术的不断进步和应用的不断拓展,人工智能将在更多领域展现出其独特的优势和价值,为人类社会的发展和进步做出更大的贡献。同时,我们也需要关注人工智能可能带来的风险和挑战,如数据安全、隐私保护等问题,积极制定相关政策和法规,确保人工智能的健康发展。
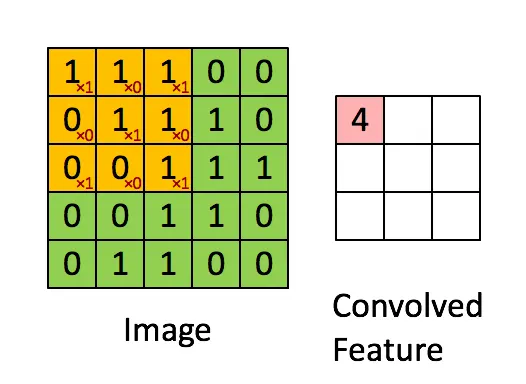
目标检测
AI+Robot轨迹跟踪